# Uncomment to run the notebook in Colab
# ! pip install -q "wax-ml[complete]@git+https://github.com/eserie/wax-ml.git"
# ! pip install -q --upgrade jax jaxlib==0.1.70+cuda111 -f https://storage.googleapis.com/jax-releases/jax_releases.html
# check available devices
import jax
print("jax backend {}".format(jax.lib.xla_bridge.get_backend().platform))
jax.devices()
WARNING:absl:No GPU/TPU found, falling back to CPU. (Set TF_CPP_MIN_LOG_LEVEL=0 and rerun for more info.)
WARNING:absl:No GPU/TPU found, falling back to CPU. (Set TF_CPP_MIN_LOG_LEVEL=0 and rerun for more info.)
jax backend cpu
[CpuDevice(id=0)]
🦎 Online linear regression with a non-stationary environment 🦎¶
![]()
We implement an online learning non-stationary linear regression problem.
We go there progressively by showing how a linear regression problem can be cast
into an online learning problem thanks to the OnlineSupervisedLearner module.
Then, to tackle a non-stationary linear regression problem (i.e. with a weight that can vary in time)
we reformulate the problem into a reinforcement learning problem that we implement with the GymFeedBack module of WAX-ML.
We then need to define an “agent” and an “environment” using simple functions implemented with modules:
The agent is responsible for learning the weights of its internal linear model.
The environment is responsible for generating labels and evaluating the agent’s reward metric.
We experiment with a non-stationary environment that returns the sign of the linear regression parameters at a given time step, known only to the environment.
This example shows that it is quite simple to implement this online-learning task with WAX-ML tools. In particular, the functional workflow adopted here allows reusing the functions implemented for a task for each new task of increasing complexity,
In this journey, we will use:
Haiku basic linear module
hk.Linear.Optax stochastic gradient descent optimizer:
sgd.WAX-ML modules:
OnlineSupervisedLearner,Lag,GymFeedBackWAX-ML helper functions:
unroll,jit_init_apply
%pylab inline
Populating the interactive namespace from numpy and matplotlib
import haiku as hk
import jax
import jax.numpy as jnp
import optax
from matplotlib import pyplot as plt
from wax.compile import jit_init_apply
from wax.modules import OnlineSupervisedLearner
Static Linear Regression¶
First, let’s implement a simple linear regression
Generate data¶
Let’s generate a batch of data:
seq = hk.PRNGSequence(42)
X = jax.random.normal(next(seq), (100, 3))
w_true = jnp.ones(3)
Define the model¶
We use the basic module hk.Linear which is a linear layer.
By default, it initializes the weights with random values from the truncated normal,
with a standard deviation of \(1 / \sqrt{N}\) (See https://arxiv.org/abs/1502.03167v3)
where \(N\) is the size of the inputs.
@jit_init_apply
@hk.transform_with_state
def linear_model(x):
return hk.Linear(output_size=1, with_bias=False)(x)
Run the model¶
Let’s run the model using WAX-ML unroll on the batch of data.
from wax.unroll import unroll
params, state = linear_model.init(next(seq), X[0])
linear_model.apply(params, state, None, X[0])
(DeviceArray([-0.2070887], dtype=float32), FlatMapping({}))
Y_pred = unroll(linear_model, rng=next(seq))(X)
Y_pred.shape
(100, 1)
Check cost¶
Let’s look at the mean squared error for this non-trained model.
noise = jax.random.normal(next(seq), (100,))
Y = X.dot(w_true) + noise
L = ((Y - Y_pred) ** 2).sum(axis=1)
mean_loss = L.mean()
assert mean_loss > 0
Let’s look at the regret (cumulative sum of the loss) for the non-trained model.
plt.plot(L.cumsum())
plt.title("Regret")
Text(0.5, 1.0, 'Regret')
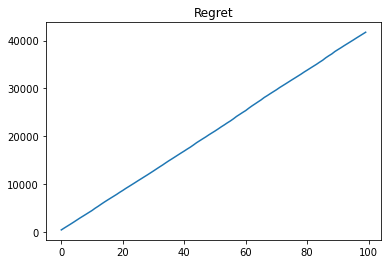
As expected, we have a linear regret when we did not train the model!
Online Linear Regression¶
We will now start training the model online. For a review on online-learning methods see [1]
[1] Elad Hazan, Introduction to Online Convex Optimization
Define an optimizer¶
opt = optax.sgd(1e-3)
Define a loss¶
Since we are doing online learning, we need to define a local loss function: $\( \ell_t(y, w, x) = \lVert y_t - w \cdot x_t \rVert^2 \)$
@jax.jit
def loss(y_pred, y):
return jnp.mean(jnp.square(y_pred - y))
Define a learning strategy¶
@jit_init_apply
@hk.transform_with_state
def learner(x, y):
return OnlineSupervisedLearner(linear_model, opt, loss)(x, y)
Generate data¶
def generate_many_observations(T=300, sigma=1.0e-2, rng=None):
rng = jax.random.PRNGKey(42) if rng is None else rng
X = jax.random.normal(rng, (T, 3))
noise = sigma * jax.random.normal(rng, (T,))
w_true = jnp.ones(3)
noise = sigma * jax.random.normal(rng, (T,))
Y = X.dot(w_true) + noise
return (X, Y)
T = 3000
X, Y = generate_many_observations(T)
Unroll the learner¶
(output, info) = unroll(learner, rng=next(seq))(X, Y)
Plot the regret¶
Let’s look at the loss and regret over time.
fig, axs = plt.subplots(1, 2, figsize=(9, 3))
axs[0].plot(info.loss.cumsum())
axs[0].set_title("Regret")
axs[1].plot(info.params["linear"]["w"][:, 0, 0])
axs[1].set_title("Weight[0,0]")
Text(0.5, 1.0, 'Weight[0,0]')
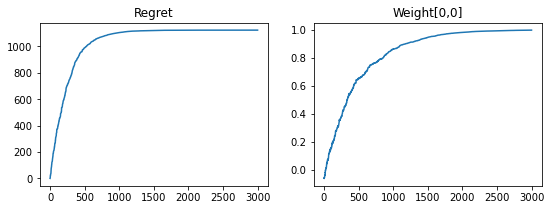
We have sub-linear regret!
Online learning with Gym¶
Now we will recast the online linear regression learning task as a reinforcement learning task
implemented with the GymFeedback module of WAX-ML.
For that, we define:
obserbations (
obs) : pairs(x, y)of features and labelsraw observations (
raw_obs): pairs(x, noise)of features and noise.
Linear regression agent¶
In WAX-ML, an agent is a simple function with the following API:

Let’s define a simple linear regression agent with the elements we have defined so far.
def linear_regression_agent(obs):
x, y = obs
@jit_init_apply
@hk.transform_with_state
def model(x):
return hk.Linear(output_size=1, with_bias=False)(x)
opt = optax.sgd(1e-3)
@jax.jit
def loss(y_pred, y):
return jnp.mean(jnp.square(y_pred - y))
return OnlineSupervisedLearner(model, opt, loss)(x, y)
Linear regression environment¶
In WAX-ML, an environment is a simple function with the following API:

Let’s now define a linear regression environment that, for the moment, have static weights.
It is responsible for generating the real labels and evaluating the agent’s reward.
For the evaluation of the reward, we need the Lag module to evaluate the action of
the agent with the labels generated in the previous time step.
from wax.modules import Lag
def stationary_linear_regression_env(action, raw_obs):
# Only the environment now the true value of the parameters
w_true = -jnp.ones(3)
# The environment has its proper loss definition
@jax.jit
def loss(y_pred, y):
return jnp.mean(jnp.square(y_pred - y))
# raw observation contains features and generative noise
x, noise = raw_obs
# generate targets
y = x @ w_true + noise
obs = (x, y)
y_previous = Lag(1)(y)
# evaluate the prediction made by the agent
y_pred = action
reward = loss(y_pred, y_previous)
return reward, obs, {}
Generate raw observation¶
Let’s define a function that generate the raw observation:
def generate_many_raw_observations(T=300, sigma=1.0e-2, rng=None):
rng = jax.random.PRNGKey(42) if rng is None else rng
X = jax.random.normal(rng, (T, 3))
noise = sigma * jax.random.normal(rng, (T,))
return (X, noise)
Implement Feedback¶
We are now ready to set things up with the GymFeedback module implemented in WAX-ML.
It implements the following feedback loop:

Equivalently, it can be described with the pair of init and apply functions:

from wax.modules import GymFeedback
@hk.transform_with_state
def gym_fun(raw_obs):
return GymFeedback(
linear_regression_agent, stationary_linear_regression_env, return_action=True
)(raw_obs)
And now we can unroll it on a sequence of raw observations!
seq = hk.PRNGSequence(42)
T = 3000
raw_observations = generate_many_raw_observations(T)
rng = next(seq)
(gym_output, gym_info) = unroll(gym_fun, rng=rng, skip_first=True)(raw_observations)
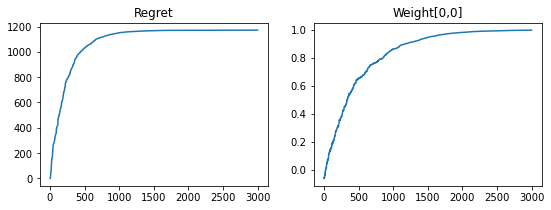
Let’s visualize the outputs.
We now use pd.Series to represent the reward sequence since its first value is Nan due to the use of the lag operator.
import pandas as pd
fig, axs = plt.subplots(1, 2, figsize=(9, 3))
pd.Series(gym_output.reward).cumsum().plot(ax=axs[0], title="Regret")
axs[1].plot(info.params["linear"]["w"][:, 0, 0])
axs[1].set_title("Weight[0,0]")
Text(0.5, 1.0, 'Weight[0,0]')
Non-stationary environment¶
Now, let’s implement a non-stationary environment.
We implement it so that the sign of the weight is reversed after 2000$ steps.
class NonStationaryEnvironment(hk.Module):
def __call__(self, action, raw_obs):
step = hk.get_state("step", [], init=lambda *_: 0)
# Only the environment now the true value of the parameters
# at step 2000 we flip the sign of the true parameters !
w_true = hk.cond(
step < 2000,
step,
lambda step: -jnp.ones(3),
step,
lambda step: jnp.ones(3),
)
# The environment has its proper loss definition
@jax.jit
def loss(y_pred, y):
return jnp.mean(jnp.square(y_pred - y))
# raw observation contains features and generative noise
x, noise = raw_obs
# generate targets
y = x @ w_true + noise
obs = (x, y)
# evaluate the prediction made by the agent
y_previous = Lag(1)(y)
y_pred = action
reward = loss(y_pred, y_previous)
step += 1
hk.set_state("step", step)
return reward, obs, {}
Now let’s run a gym simulation to see how the agent adapt to the change of environment.
@hk.transform_with_state
def gym_fun(raw_obs):
return GymFeedback(
linear_regression_agent, NonStationaryEnvironment(), return_action=True
)(raw_obs)
T = 6000
raw_observations = generate_many_raw_observations(T)
rng = jax.random.PRNGKey(42)
(gym_output, gym_info) = unroll(gym_fun, rng=rng, skip_first=True)(
raw_observations,
)
import pandas as pd
fig, axs = plt.subplots(1, 2, figsize=(9, 3))
pd.Series(gym_output.reward).cumsum().plot(ax=axs[0], title="Regret")
axs[1].plot(gym_info.agent.params["linear"]["w"][:, 0, 0])
axs[1].set_title("Weight[0,0]")
# plt.savefig("../_static/online_linear_regression_regret.png")
Text(0.5, 1.0, 'Weight[0,0]')
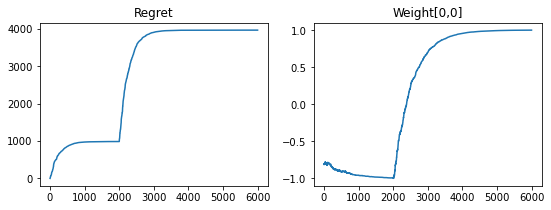
It adapts!
The regret first converges, then jumps on step 2000 and finally readjusts to the new regime.
We see that the weights converge to the correct values in both regimes.